The term project in Intro to Robotics was to modify a mobile robot to scoop and deposit “lunar regolith.” We developed a 3-DOF robot scoop mechanism with steppers and DC motors, and I wrote the backing suite of ROS nodes for low level feedback control, computer vision-based localization and detection, and trajectory planning and execution.
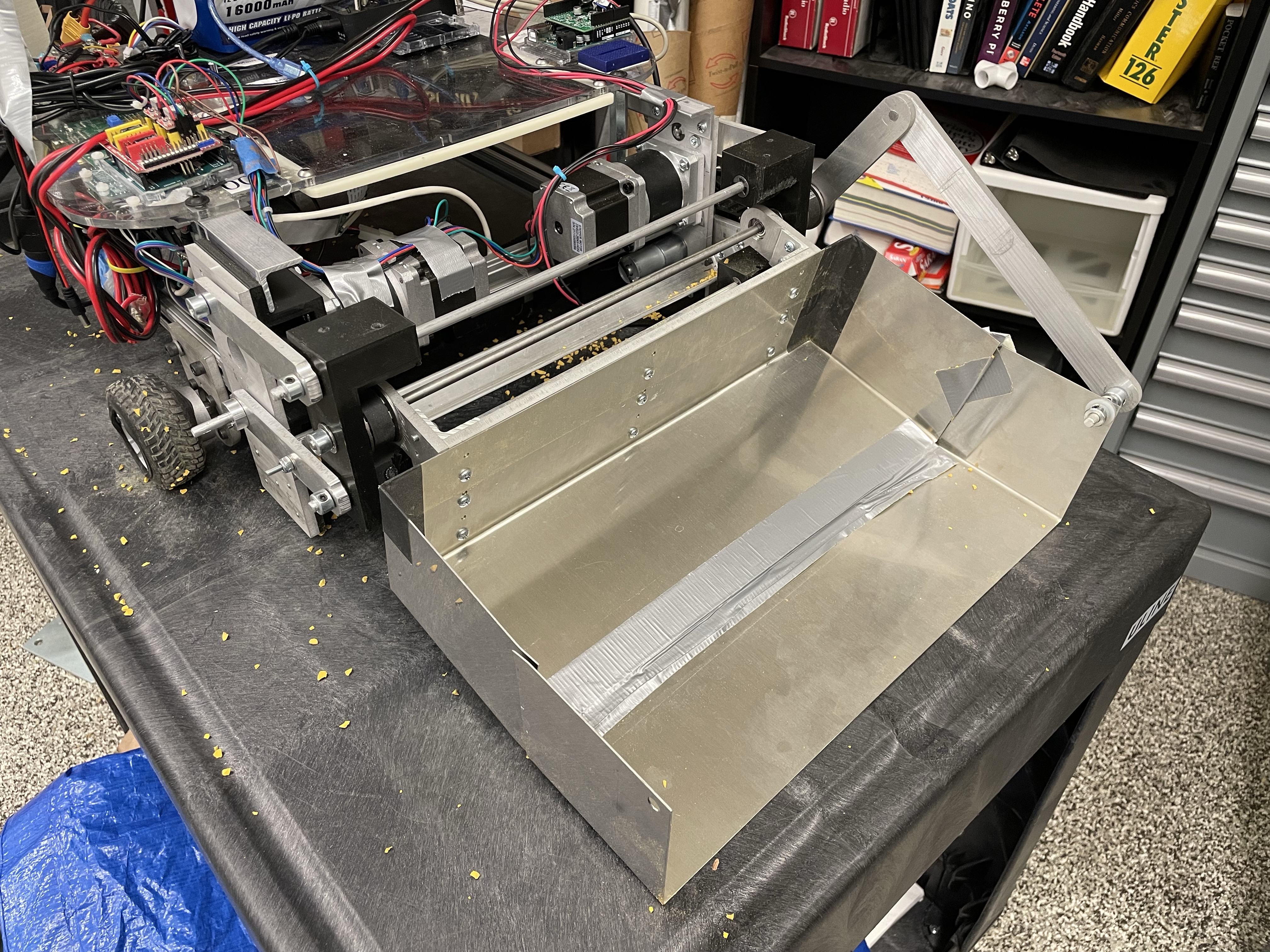
Our completed robot.
A video of our robot autonomously completing the scooping, navigating, and depositing challenge for the term project competition.
Design presentation detailing the hardware and software features of the scoop and scooping robot.