I designed and fabricated most of our Bio-inspired Robotics group final project, which was a 3-DOF robot arm, that had two actuated and one spring-loaded joint, that threw projectiles at upwards of 5 m/s.
Throw demonstration!
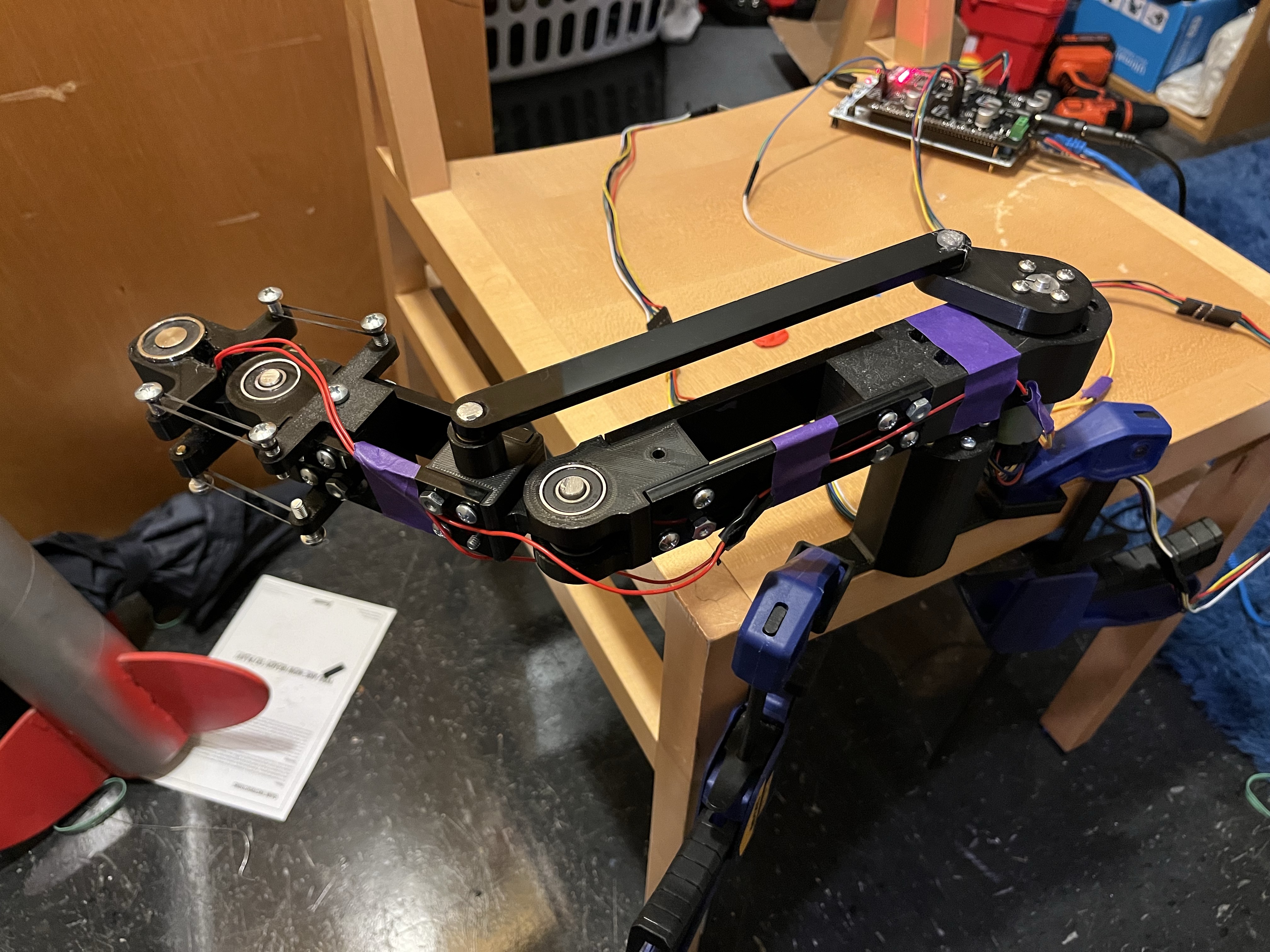
Our completed robot.
Our final poster.